
Embedded Control Systems: Adaptive Cruise Control with Haptic Interface
Published in EECS 461 Embedded Control Systems – University of Michigan, 2025
Group Members: Haobo Fang, Guanyu Xu.
Project Status: Completed (Winter 2025). For more details, see our project manual and final report.
Abstract: This course project integrated concepts from embedded systems, digital/analog interfacing, and control theory through progressive lab modules and a final system design. Using the NXP S32K144 microcontroller and a haptic wheel interface, we implemented low-level I/O, PWM motor control, interrupts, virtual worlds with dynamics, CAN bus networking, and Simulink-based autocode generation.
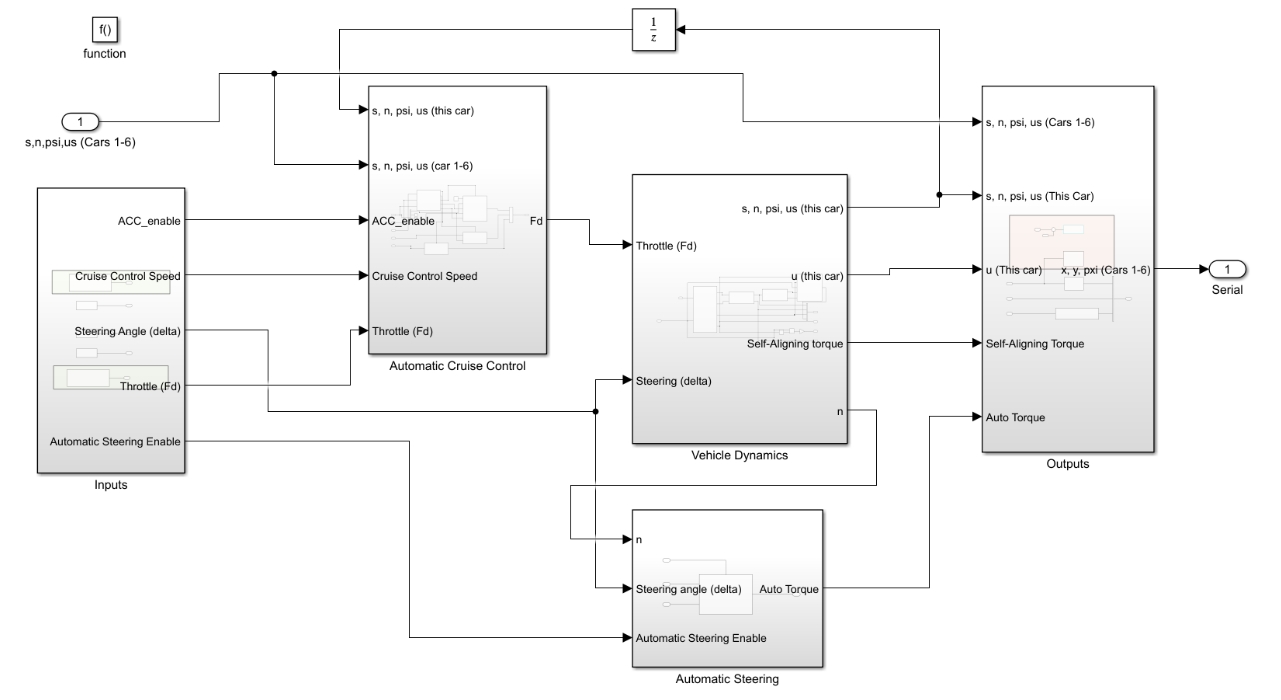
The capstone project was the design of an Adaptive Cruise Control (ACC) system with automatic steering. The ACC maintained a desired vehicle speed and adapted to traffic by switching between speed control and gap-keeping mode via CAN bus communication with up to six simulated vehicles. A PID-based steering controller guided the vehicle along a road, while the haptic wheel reflected steering forces through self-aligning torque feedback.
This integration of hardware, embedded C programming, and model-based design demonstrated how advanced automotive features can be prototyped on a real-time embedded platform, preparing us for work in cyber-physical systems, automotive engineering, and robotics.