
Lightweight, Proprioceptive, Origami-Inspired Soft Robotic Arm for High Payload, Low-Cost Reconfigurable Manipulation
Jiyang Wang, Yuchen You, Xinqi Zhang, Haobo Fang, Jiaqi Wang, Xiaonan (Sean) Huang
Download Paper
Published in Provisional patent in preparation, U-M File 2025-609, 2025
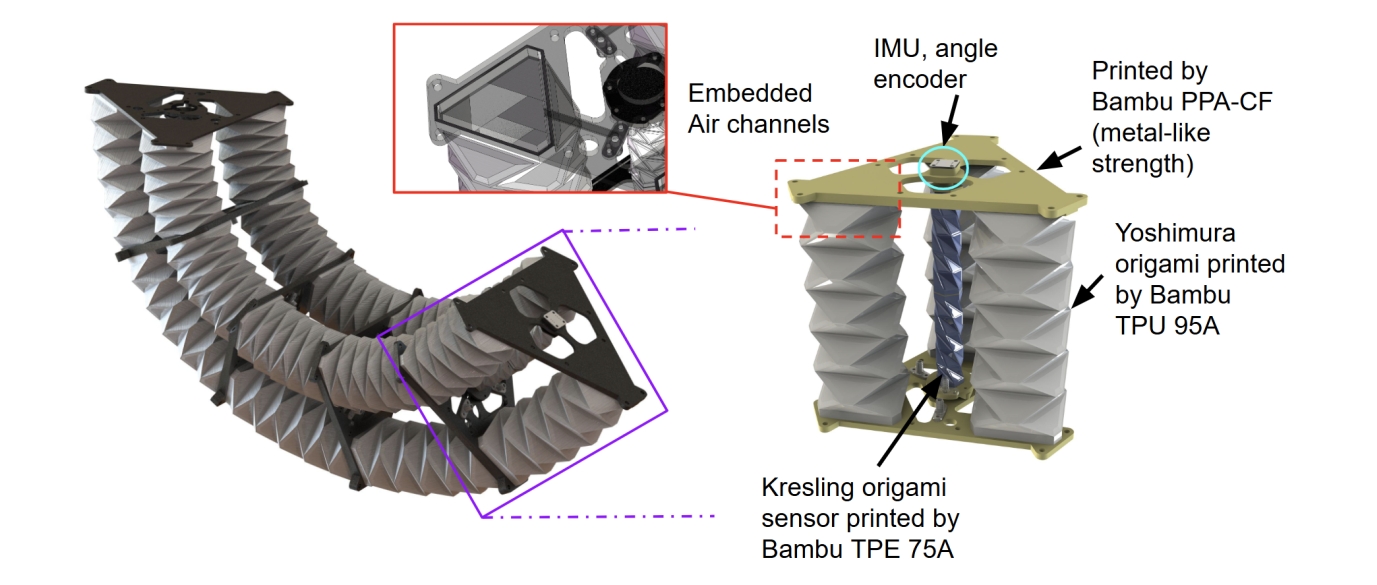
Abstract: Soft pneumatic robotic arms have emerged as promising alternatives to conventional rigid manipulators, of- fering compliance, adaptability, low-cost, and inherent safety for use alongside people. However, many existing designs suffer from limited workspace, low payload capacity, and poor resilience to external forces, restricting their applicability in industrial and field settings. In this work, we present a low- cost, lightweight, and modular soft robotic arm engineered for high payload capacity, precision control, and reconfigurability across diverse operational contexts. The arm is constructed from plug-and-play modules, each integrating three 3D-printed Yoshimura origami actuators for omnidirectional 3D bending, one 3D-printed Kresling origami structure with an embedded magnetic encoder for centerline length self-sensing, and one IMU for orientation measurement. This modular architecture enables on-the-fly customization of arm length, stiffness, and configuration, allowing for task-specific optimization without requiring significant hardware changes. The complete arm, composed of four such modules, achieves a reach of over 1100 mm, 10 mm position repeatability, over 10 kg payload capacity, and 3+ degrees of freedom, while maintaining a lightweight 3 kg structure with a total material cost under $2,000. Its soft, compliant structure reduces the risk of injury during accidental contact, making it well-suited for safe operation alongside people in dynamic environments. We validate the arm’s performance through payload testing, precision assess- ment, and modular reconfiguration experiments, demonstrating its potential for use in long-duration warehouse automation, au- tonomous inspection, sample collection, and space exploration. These results indicate that the proposed arm design offers a scalable, cost-effective, and robust alternative to conventional rigid manipulators, with potential for wide-scale deployment in next-generation robotics.